Robotic prototype
We hacked together this little guy to test out a novel idea for getting robots to walk.
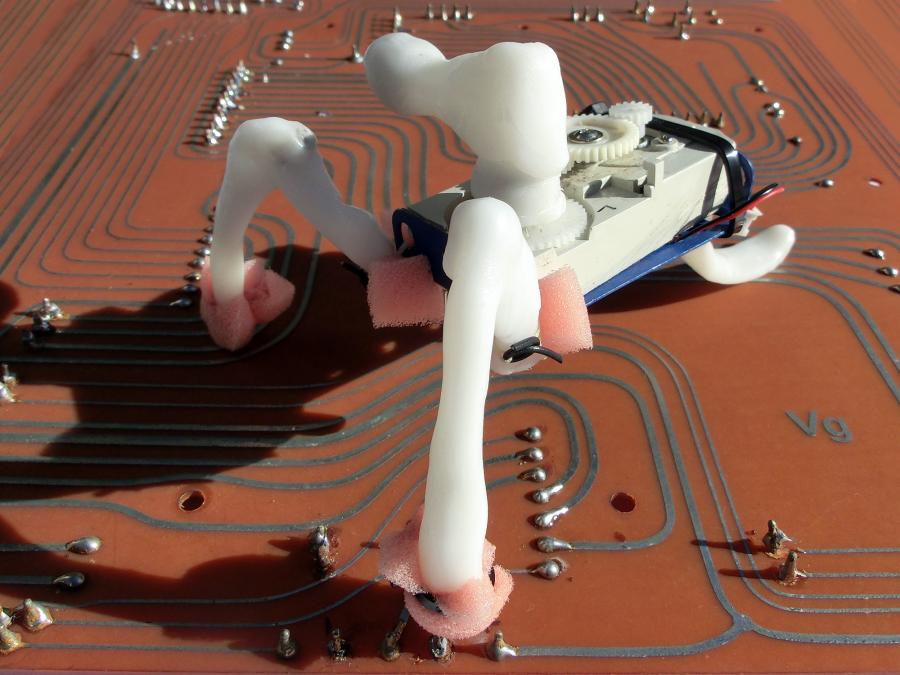
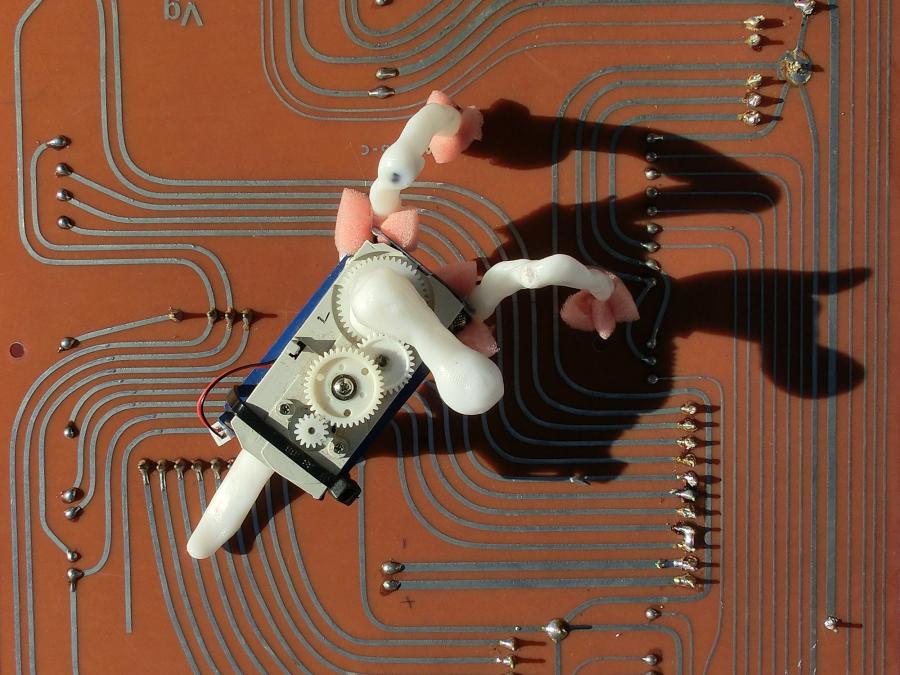
First up, we pulled the "eject" mechanism out of an old optical drive and cable tied it to an old piece of Meccano. This forms the base of the robot.
The core idea is that we embedded a 1cm-diameter neodymium magnet into some Plastimake and attached it to the spinning cog in the centre of the optical drive mechanism. We also embedded magnets into the top side of the "knee" of each leg.
As the large centre magnet spins around and passes over each leg, it pulls the magnet in the knee up, enabling the robot to "walk" along.
At least, that's how we hoped it would work. In practice we found that the optical drive motor isn't geared down sufficiently. It still spins quite fast, causing the robot to thrash around a little.
However, it can confidently scuttle across a table top, so we're willing to tentatively call it a success! We're already thinking about version 2…
More Plastimake projects:











